|
Equiper un robot d'un détecteur d'obstacles IR permet au robot d'éviter un obstacle sans le toucher. Ce montage peut aussi se placer sur un autre objet car il émet des bips sonores lors de la présence d'un obstacle. - Il mesure la distance en cm entre le robot et l'obstacle et envoie la donnée sur le port sériel. Un PC ou un microcontrôleur pourront utiliser cette information. - Il émet des bips sonores à une certaine distance de l'obstacle. L'intervalle entre les bips sonores dépend de la distance entre le robot et l'obstacle. Il est de plus en plus court lorsque le robot se rapproche de l'obstacle. Cette fonction peut être supprimmée en ouvrant un interrupteur. |
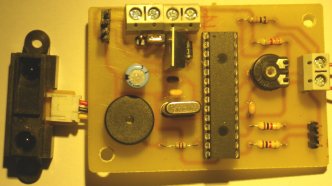
Le montage électronique
- Le circuit est alimenté en 5 V ou entre 9 et 12 V. Un cavalier permet le choix de l'alimentation. |
||||
|
|||||
Le capteur IR un GP2Y0A21YK0F de Sharp fournit pratiquement dans sa partie utile une tension inversement proportionnelle à la distance. Cette approximation est suffisante pour notre application.
Une alimentation de 9 à 12 V est prévue avec son régulateur U2 un 7805, mais on peut aussi alimenter le circuit directement en 5 V. En plaçant un interrupteur sur PL1 on peut stopper l'émission des bips sonores (interrupteur ouvert). Le Pic comporte encore de nombreuses broches libres utilisables pour la commande du robot. |
GP2Y0A21YK0F |
||||
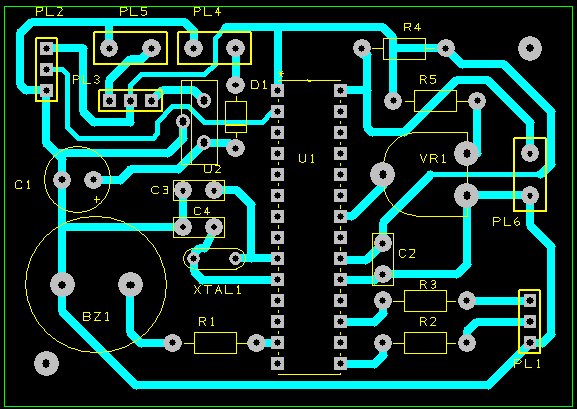
Les branchements sont à réaliser comme le montre le dessin ci-dessous :
|
|||||
Le programme est écrit en JAL (Just another Language). Ce langage permet la programmation des PIC de Microchip. Le logiciel est libre et le site propose un tutoriel et une platine de dévéloppement. Charger l'IDE permet de modifier le programme à sa guise sinon on programmera le PIC avec le fichier .hex.
|
 |
||||